












Túto jeseň som sa zapojil do vedeckej súťaže Festival vedy a techniky, ktorú každoročne organizuje AMAVET (Asociácia pre mládež, vedu a techniku). Cieľom môjho projektu bolo využiť ľahko dostupné modelárske komponenty a navrhnúť a postaviť efektívny bezpilotný letecký systém. Túto tému som si sám vybral, keďže sa už niekoľko rokov ako samouk venujem modelárstvu. Som veľmi rád, že môj projekt zaujal aj odbornú hodnotiacu komisiu, ktorá ho nominovala na renomovanú medzinárodnú vedeckú súťaž Regeneron ISEF (International Science and Engineering Fair). V máji na nej budem v Atlante (USA) reprezentovať Slovensko. Môj projekt by som vám v tomto blogu rád v krátkosti predstavil.

Trh s dronmi by sme mohli rozdeliť na trh s multikoptérami a lietadlami. Zatiaľ čo trhu s multikoptérami dominujú veľké firmy ako DJI, ktoré ovládajú jeho väčšinu, trh s lietadlami je veľmi špecifický a súperí v ňom veľa menších firiem. Multikoptéru si dnes vie človek vybrať presne podľa svojich potrieb a za prijateľnú cenu, keďže sa vyrábajú vo veľkých množstvách. Naproti tomu ponuka lietadiel je obmedzenejšia a menej cenovo dostupná. Preto som chcel navrhnúť cenovo dostupnú komplexnú leteckú platformu, ktorá by sa vedela aj komerčne uplatniť.
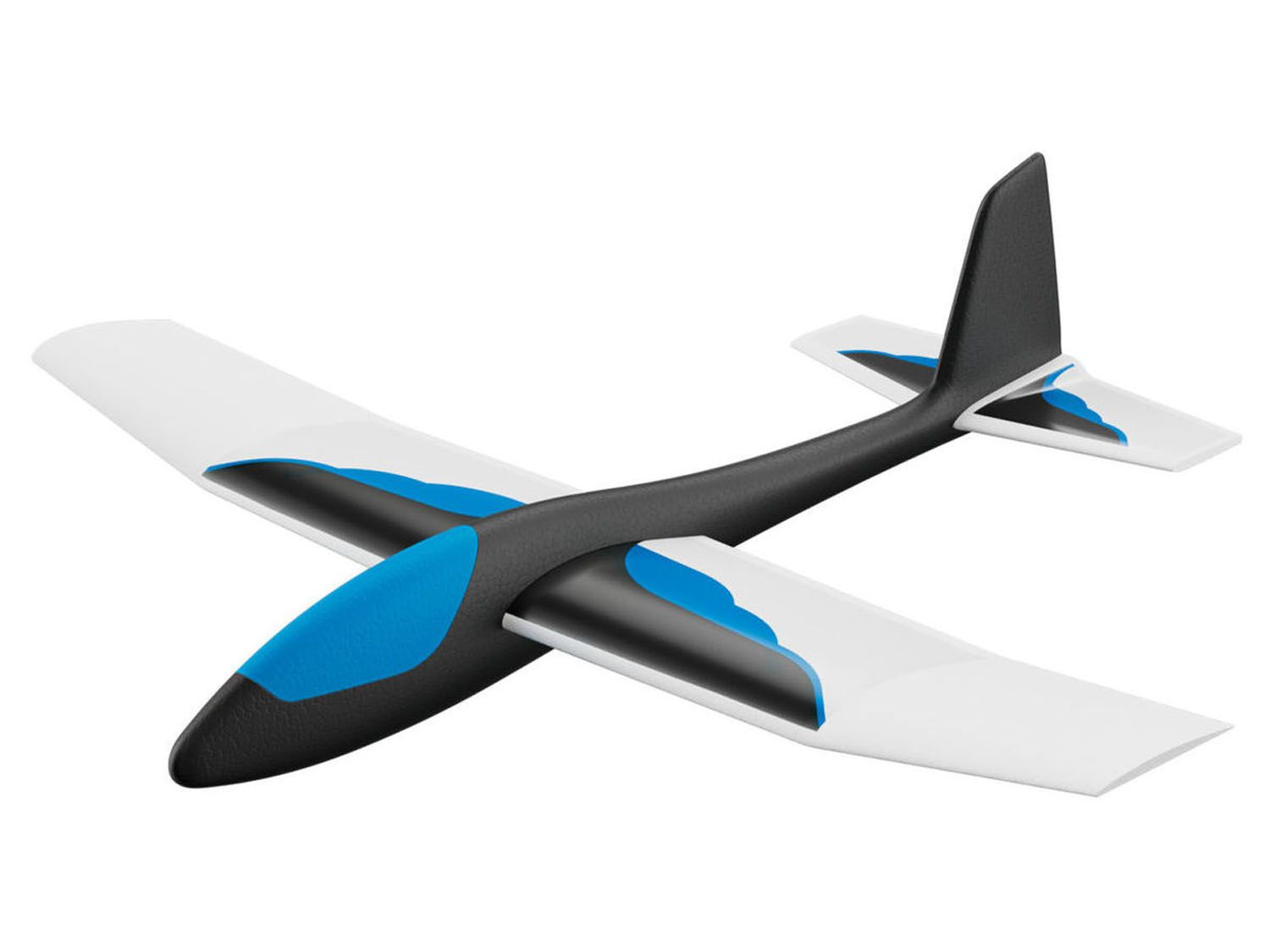
Za základ celého systému som si vybral hádzadlo z Lidla. Určite existujú aj iné modely s lepšími letovými vlastnosťami, no nespornou výhodou takéhoto hádzadla bola jeho cena (10€) a kompaktnosť. Okrem toho som už mal s týmito hádzadlami a ich prestavbou na RC modely nejaké skúsenosti.
Prácu na lietadle som rozdelil na viacero častí tak, ako sa to robí pri návrhu skutočných lietadiel. Dôležité v nich bolo hľadať také dizajnové návrhy, ktorých pospájaním by som vyrobil model s energeticky najefektívnejším letom.
 |
 |
 |
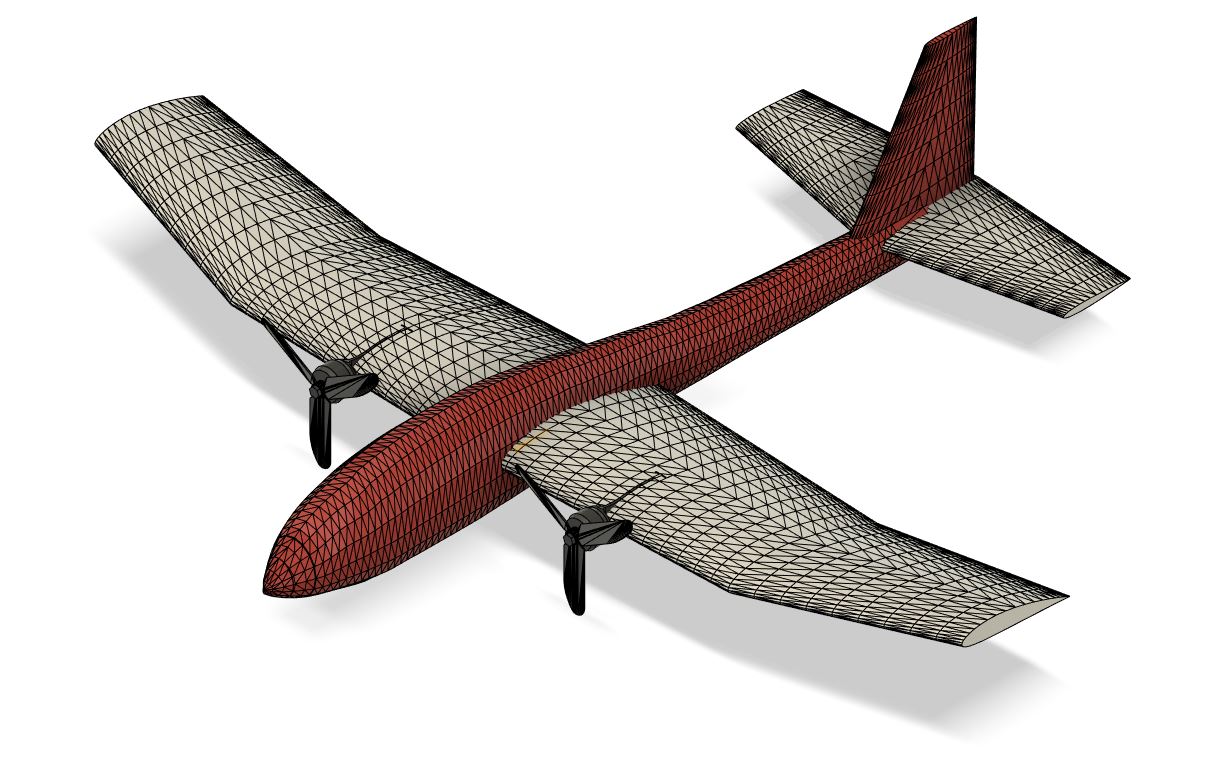
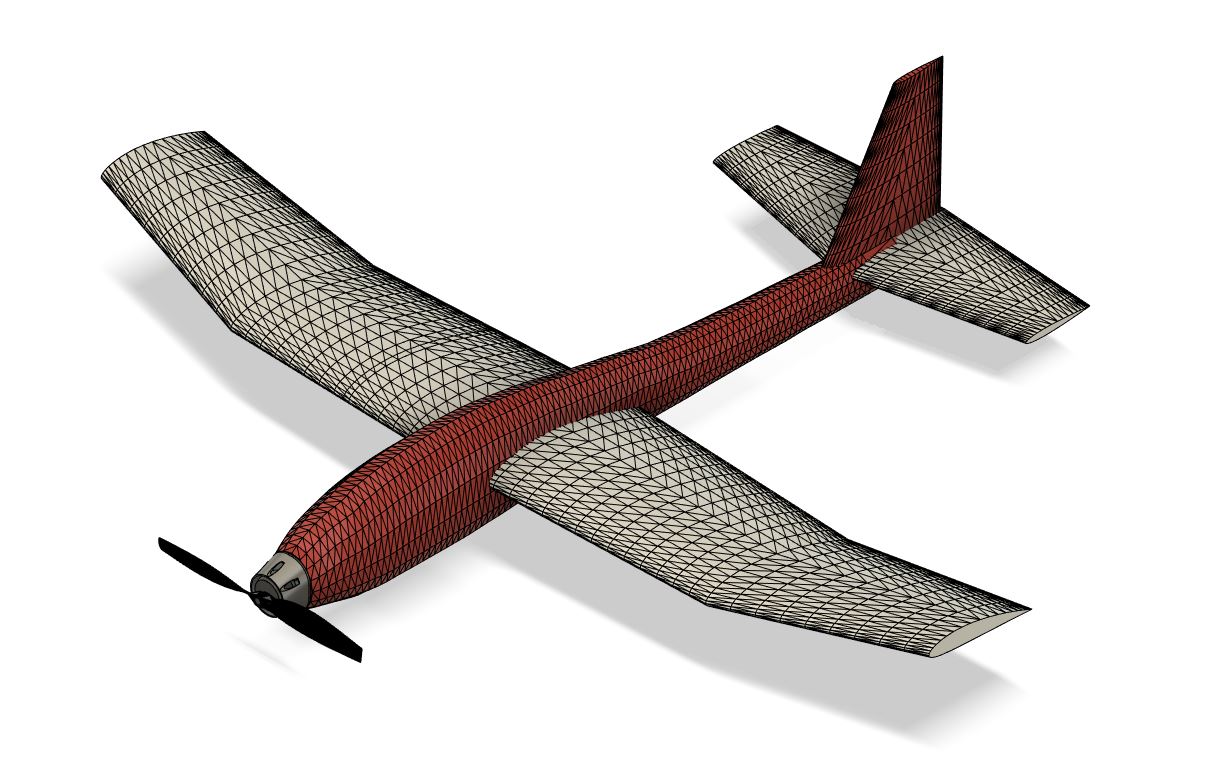
Prvou časťou bol návrh pohonnej jednotky lietadla. V nej som najskôr hľadal najlepšie umiestnenie pohonnej jednotky na modeli a potom som staticky testoval kombinácie vhodných motorov a vrtulí. Namerané dáta mi potvrdili, že najefektívnejším riešením je umiestniť na model jeden motor s čo najväčšou vrtuľou. Pomalšie sa otáčajúca vrtuľa tak urýchľuje väčší objem vzduchu na menšiu rýchlosť, pri čom vznikajú oveľa menšie straty ako pri použití rýchlo sa točiacej malej vrtule. Motor som preto umiestnil do nosu lietadla a na model osadil sklopnú vrtuľu s relatívne veľkým priemerom.
 |
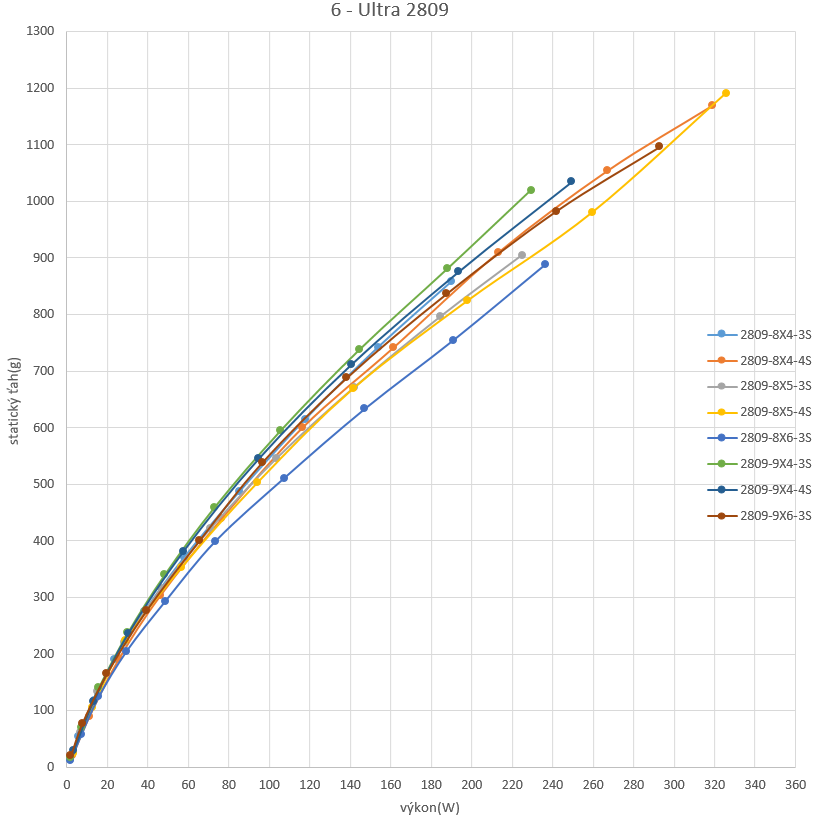 |
| Testovací setup | Graf s nameranými údajmi pre jeden motor |
Dokopy som otestoval sedem motorov a asi desať vrtulí pre rôzne konfigurácie pohonnej jednotky pracujúce s napätiami 3S a 4S. Zistil som, že správny výber pohonnej jednotky vie významne ovplyvniť letový čas a neoplatí sa ho zanedbať. Uvedomujem si, že statické testovanie neodzrkadľuje realitu počas letu, no umožňuje porovnať motory pri rovnakých podmienkach a aproximovať ich výkony počas letu. Napríklad rozdiely, ktoré som pozoroval na týchto testoch medzi motormi druhého prototypu a finálneho modelu sa aj v realite prejavili na celkovej dobe letu týchto lietadiel.
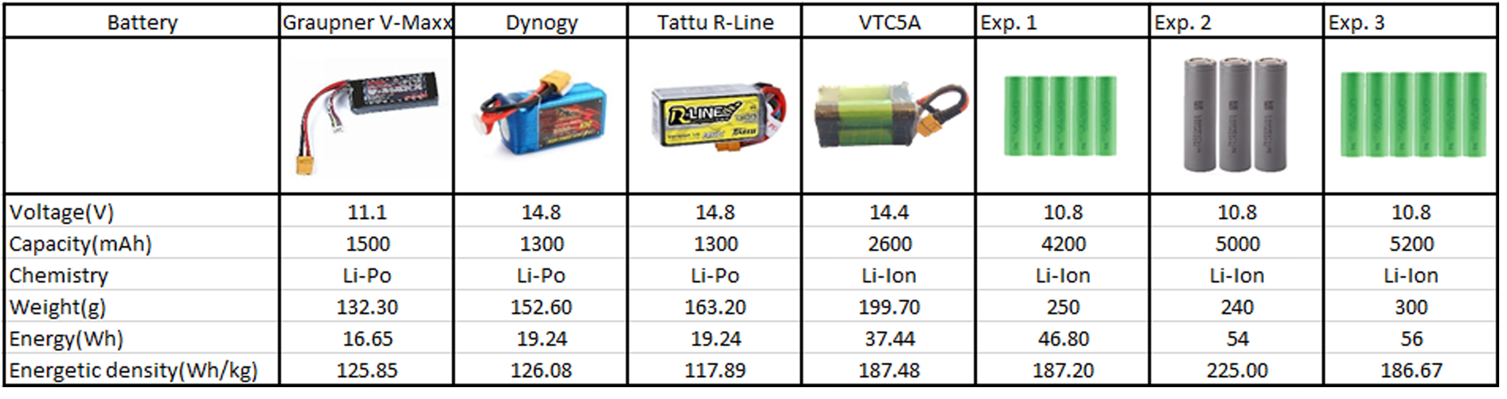
Na pohon modelu som zo začiatku využíval troj a štvorčlánkové LiPo akumulátory. Neskôr som si vyrobil vlastný LiIon akumulátor z 18650 článkov. Vďaka veľkej efektivite pohonnej jednotky sa priemerný prúdový ober modelu pohybuje do 3A. Taký prúd viem spoľahlivo odoberať aj z LiIon akumulátorov s vysokou energetickou hustotou (o 50 – 90% vyššou ako pri LiPo).
V časti aerodynamika som robil niekoľko simulácií v open source programe OpenVSP, ktorými som zisťoval stabilitu modelu, správne umiestnenie ťažiska a uhol nábehu pre čo najefektívnejší let. Všeobecne som si taktiež overil dôležitosť minimalizovania odporových síl a pri stavbe som sa snažil umiestniť na model všetky komponenty tak, aby bol odpor lietadla čo najmenší.

Výber vhodných komponentov pre tento systém bol ďalšou veľkou časťou projektu. Hľadal som cenovo dostupné spoľahlivé komponenty s dobrým pomerom cena/funkcie. Dôležité boli ďalej aj ich rozmery a hmotnosť, keďže som ich inštaloval do pomerne malého lietadla. Na nahrávanie leteckých záberov som použil modifikovanú kameru Runcam 5. Odstránením krytu a akumulátoru som ušetril viac ako polovicu jej hmotnosti a veľmi zmenšil aj jej rozmery pri zachovaní všetkých jej funkcií. Okrem toho som počas práce na projekte navrhol a vytlačil na 3D tlačiarni mnoho variácií viacerých komponentov. Držiak kamery umožňuje kameru plynule natáčať v rozsahu asi 120 stupňov a natáčať tak v smere letu aj kolmo nadol.
Návrh riadiacej stanice bol kľúčový hlavne z hľadiska užívateľského komfortu. Je v nej integrovaný monitor na zobrazenie FPV prenosu a miesto na notebook. Počas transportu sa do nej zmestia ešte aj potrebné akumulátory, box s príslušenstvom a vysielačka.
 |
 |
 |
| 1. prototyp | 2. prototyp | Finálny model |
Spolu som na tento projekt postavil tri lietadlá, pričom prvý prototyp som vyrobil bez hlbšieho pochopenia problematiky letu. Od ostatných sa výrazne líšil konfiguráciou pohonnej jednotky, ktorá pozostávala z dvoch motorov umiestnených na krídle, zlým umiestnením komponentov voľne na trupe lietadla, pevne osadeným krídlom a veľkou hmotnosťou. Kvôli tomu dosahoval letové časy do cca. 18 minút.
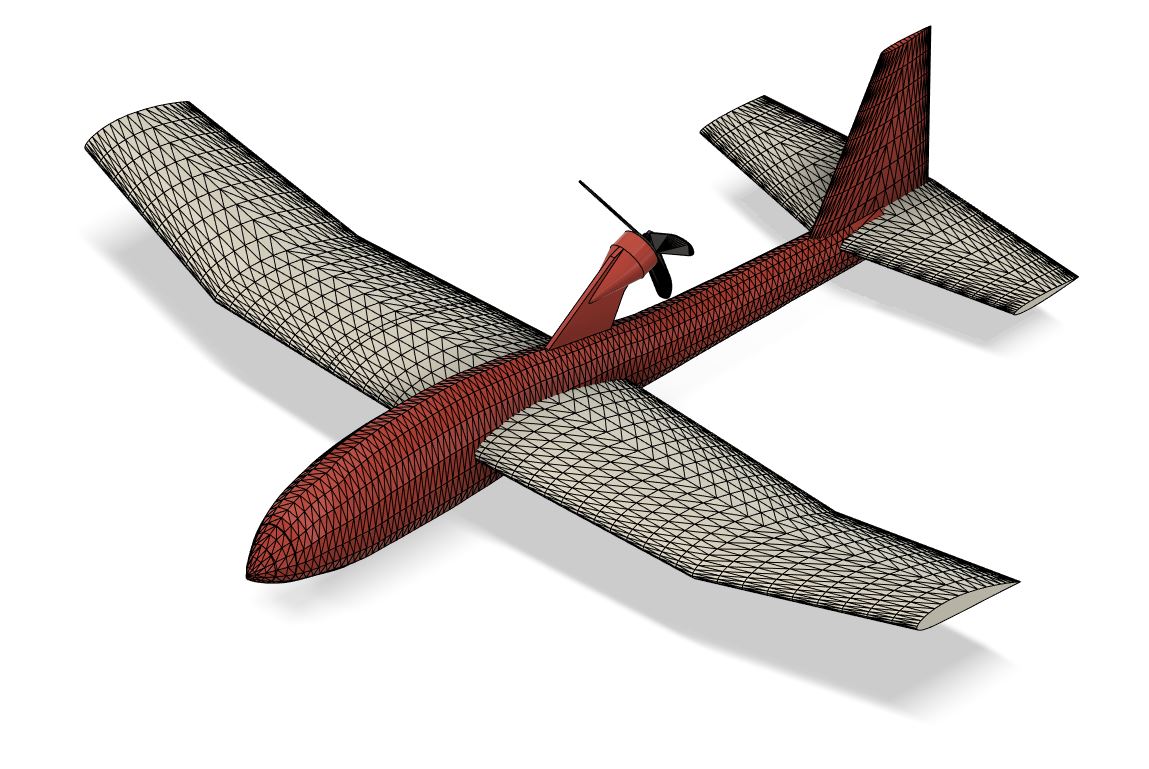
Nad návrhom druhého prototypu som strávil oveľa viac času a snažil som sa ho výrazne vylepšiť. Pohonná jednotka sa presunula do nosu lietadla a kamera na krídlo. To značne zhoršilo obtekanie jednej polovice krídla a let modelu bol pri nízkych rýchlostiach nestabilný. Komponenty som zapustil do trupu, hmotnosť znížil o asi 15% a dosiahol letový čas až 35 minút.
Finálny model sa zvonku nápadne podobá na druhý prototyp. Pri jeho návrhu som sa snažil odstrániť problémy druhého prototypu, čo sa mi do veľkej miery aj podarilo. Kameru som umiestnil na druhú polovicu krídla, aby lepšie vyvažovala klopný moment vrtule a zapustil som ju až do stredu krídla. Tento krok veľmi pomohol stabilite lietadla pri menších rýchlostiach. Na správne vyváženie krídla som v druhom prototype použil aj niekoľko gramové závažie. Namiesto neho som do krídla osadil pitotovu trubicu, ktorej údaje vedia riadiacemu softvéru pomôcť s ovládaním modelu. Lietadlo som osadil vhodnejším motorom s väčšou vrtuľou, vďaka čomu ďalej klesla jeho priemerná spotreba energie o ďalších 20 – 30%.
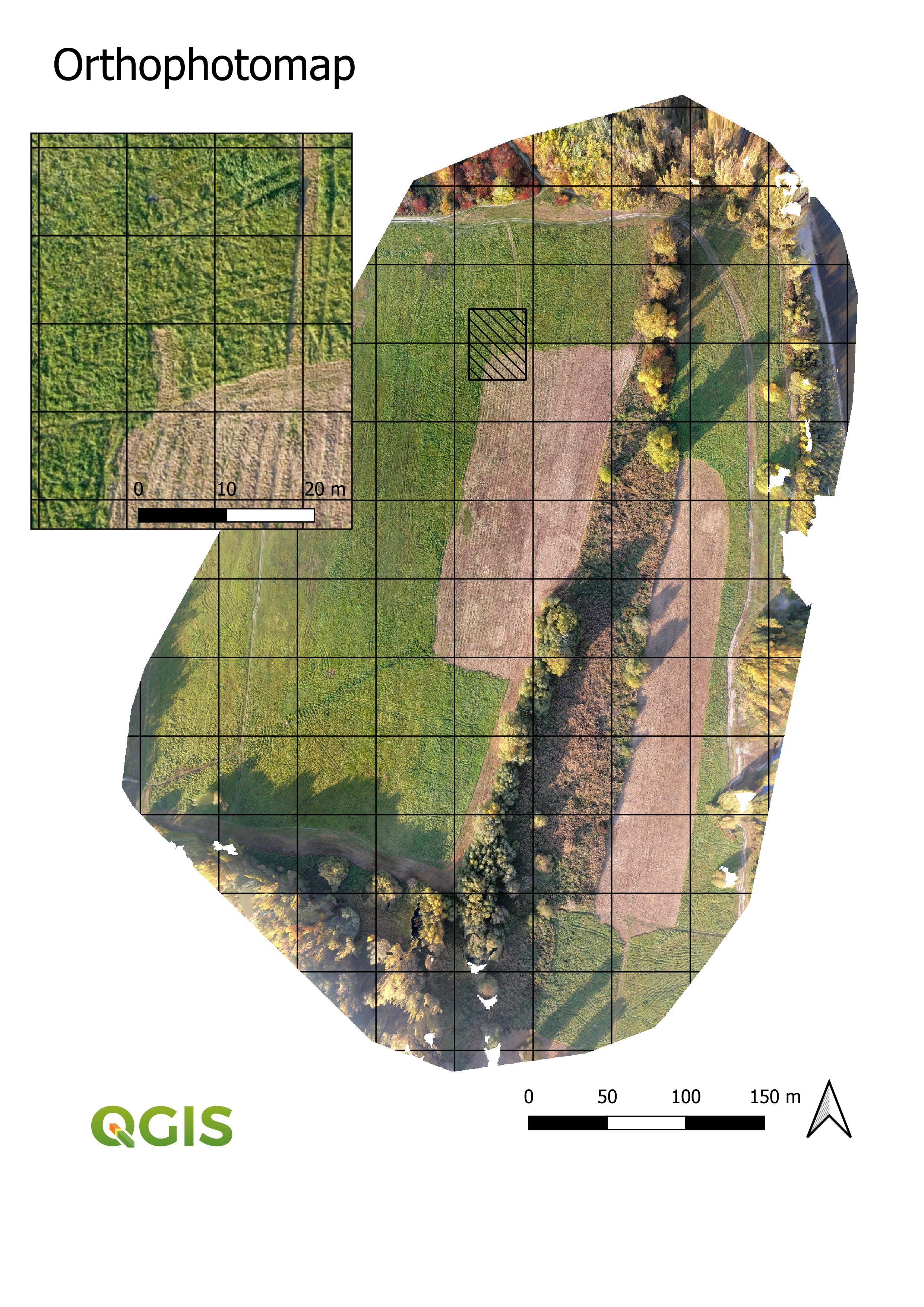
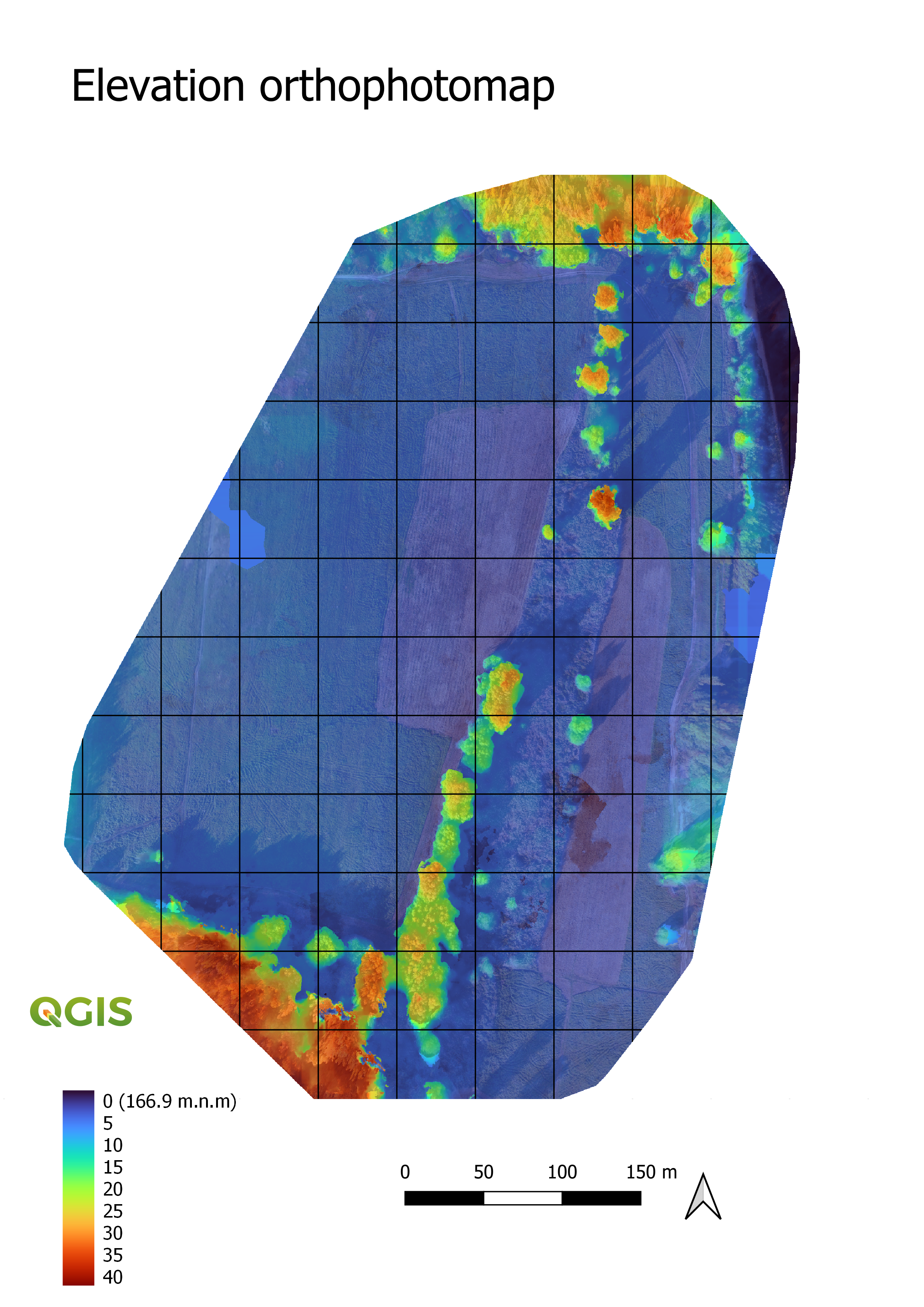


Experimentoval som s dvoma open source riadiacimi softvérmi na autonómne riadenie lietadla (Ardupilot a INAV), no nakoniec som používal Ardupilota. Nastavenie letového softvéru a jeho vyladenie bola časťou projektu, ktorá nie je až taká viditeľná. Pozostávala z veľa skúšobných letov až dokým všetko nefungovalo spoľahlivo. S druhým prototypom a finálnym modelom som vykonal viac ako 20 skúšobných letov, aby som otestoval každý systém v lietadle. Najdlhší let s finálnym modelom trval 45 minút a lietadlo počas neho preletelo viac ako 35 km (akumulátor nebol úplne vybitý a model by mohol bezpečne letieť ešte pár minút). Počas posledných letoch som sa pokúšal otestovať reálne možnosti využitia tohto systému a lietal som s ním mapovacie misie. Získané údaje som spracoval pomocou open source softvéru QGIS a vytvoril som tieto ortofotomapy a 3d model.
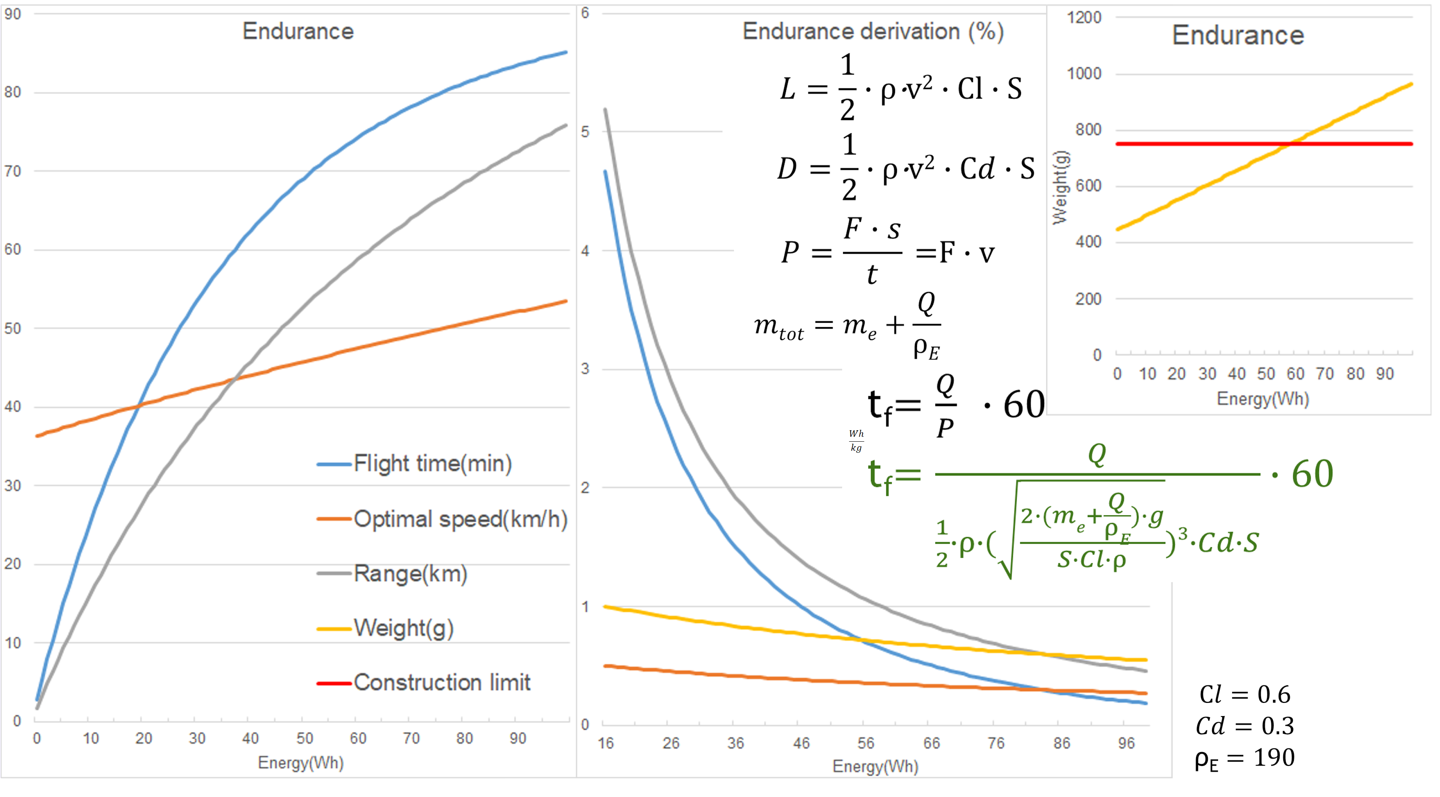
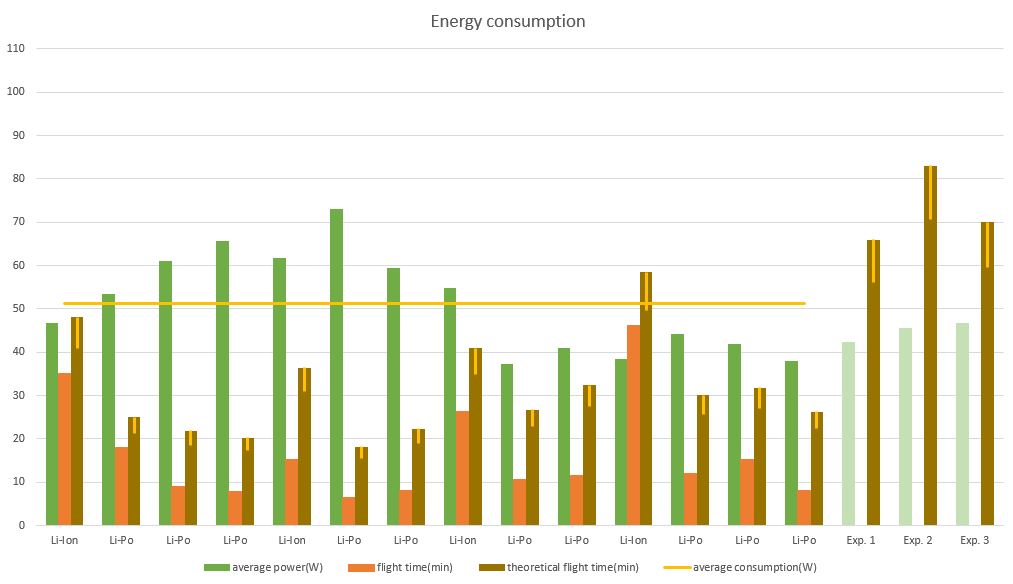
Ďalej som spracoval údaje zo všetkých letov a simulácií, aby som zistil plný potenciál lietadla. Zo základných rovníc pre výpočet vztlakovej a odporovej sily som sa vedel aj len pomocou stredoškolskej fyziky dopracovať k rovnici vyjadrujúcej letový čas v závislosti na energetickej hustote akumulátora, jeho kapacite a koeficientoch vztlaku a odporu (dajú sa získať experimentálne aj zo simulácie). Do rovnice je zapracovaný aj rast hmotnosti a zvýšenie výkonu pri zväčšovaní kapacity akumulátora. Podľa tejto teórie viem nájsť najvhodnejší akumulátor pre model a maximalizovať jeho letový čas. Cieľom do budúcna je dosiahnuť stabilne letové časy okolo 60 minút. Za taký čas sa dá zmapovať územie o rozlohe do 150ha a preletieť cca. 45 kilometrov.
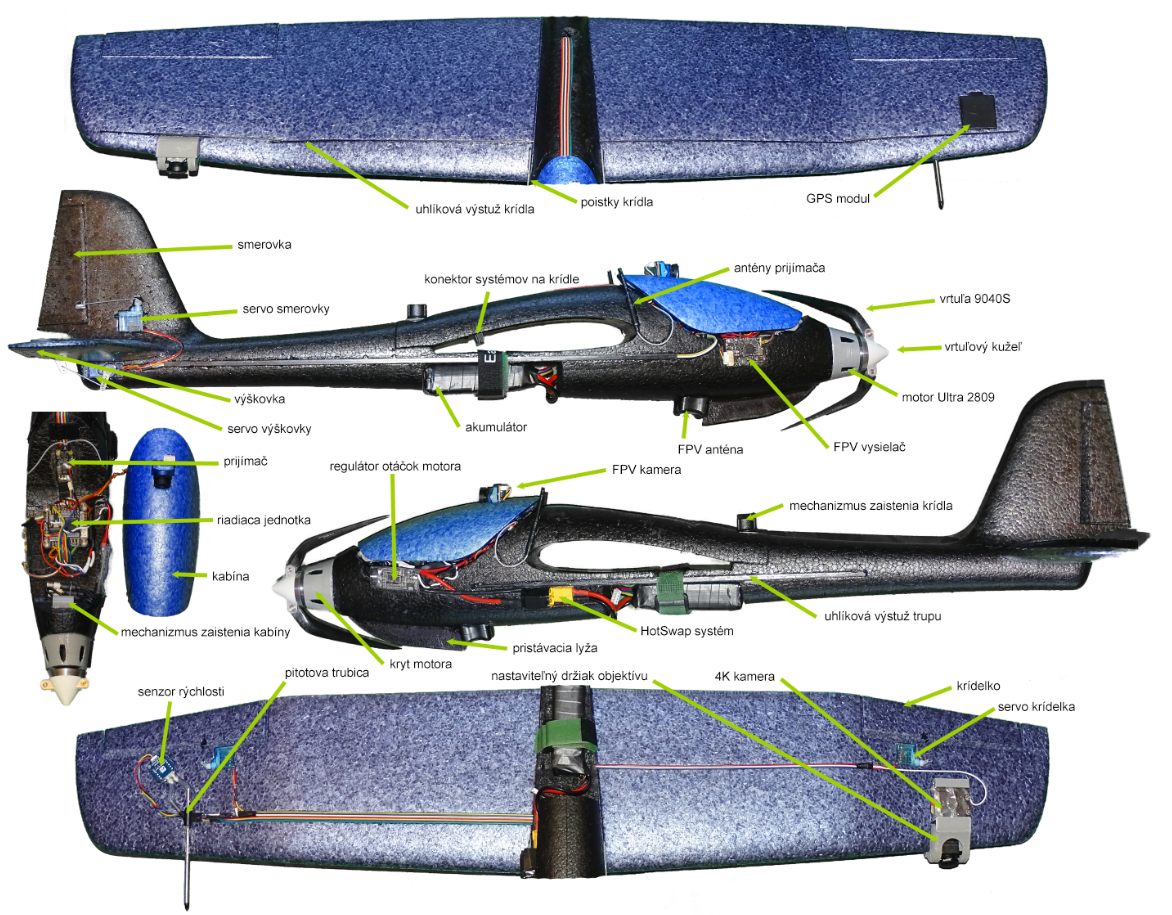
Na záver vám chcem predstaviť kľúčové inovácie tohto systému. Za najvýznamnejšiu pokladám umiestnenie kamery na krídle. S týmto návrhom som sa zatiaľ v modelárstve veľmi nestretol. A aj keď bolo ťažké umiestniť kameru tak, aby príliš nenarušovala prúdenie vzduchu, táto konštrukcia bola kľúčová pre dosiahnutie takých dlhých letových časov.
Ďalšou dobrou vlastnosťou tohto modelu je uvoľniteľná konštrukcia krídla, ktorá nie je na RC lietadlách takejto veľkosti vôbec bežná. Pri vyberaní krídla stačí uvoľniť jednu nylonovú skrutku a odpojiť multiplex konektor. To umožňuje potenciálnemu používateľovi vziať lietadlo všade tam, kam potrebuje. Celý systém sa zmestí do tašky alebo batohu.
Jednoduchým, ale skvelým systémom je môj Hot Swap systém. Umožňuje výmenu batérie medzi letmi bez toho, aby sa pri každej výmene akumulátora musel bootovať autopilot a vykonávať kalibrácie. Nabitú batériu môžete priamo zapojiť do druhého slotu, odpojiť použitú a za menej ako minútu byť znovu vo vzduchu.
Svoj účel má aj špecifická konštrukcia trupu. Dva profily z uhlíkových vlákien dodávajú celému trupu pevnosť a umožnili mi urobiť do neho veľké zárezy. Akumulátor je umiestnený pod krídlom na mieste, kde nevytvára veľký odpor, ale je stále ľahko prístupný, keď ho treba vymeniť.

Takto vyzerá môj projekt dnes, no dúfam, že sa mi ho podarí nejakým spôsobom vylepšiť a v máji s ním budem dobre reprezentovať našu krajinu za veľkou mlákou. Práve sa zamýšľam kam tento projekt chcem posunúť a čo na ňom treba opraviť/zlepšiť. Viem, že tento projekt do klasického RC hobby úplne nezapadá. Každý model je navrhnutý s nejakým účelom, v tomto prípade to bola kompaktnosť a efektivita letu. Pre zábavu si sám rád zalietam radšej s mojimi inými modelmi lietadiel. Na záver by som rád poďakoval kolegom z RC Svetu a celej modelárskej komunite za vašu podporu. Ak sa vám blog a moja práca páčili, tak mi môžete nechať hore pod nadpisom blogu like, poprípade po prihlásení nechať dole nejaký komentár :)